



Bonsoir,
Cet article, publié le 31 janvier 2020, ici :
https://www.mdpi.com/1424-8220/20/3/789
et traduit via google translate (seul, le texte original en anglais de la source fait foi) :
"
ALICE: Développement conceptuel d'un robot d'exosquelette des membres inférieurs piloté par un simulateur musculo-squelettique embarqué
par Manuel Cardona 1,2, *, †
Manuel Cardona 1,2, *, † ,Cecilia E. García Cena 1, †,Fernando Serrano 3, †etRoque Saltaren 1, †
,Cecilia E. García Cena 1, †,Fernando Serrano 3, †etRoque Saltaren 1, †
1
Center for Automation and Robotics (CAR), Universidad Politécnica de Madrid (UPM), 28006 Madrid, Espagne
2
Faculté de génie, Universidad Don Bosco (UDB), San Salvador, El Salvador
3
Faculté de génie et d'architecture, Universidad Tecnológica Centroamericana (UNITEC), Frente a Residencial, V-782 Boulevard Kennedy, Tegucigalpa, Honduras
*
Auteur à qui la correspondance doit être adressée.
†
Ces auteurs ont participé à ce travail à part égale.
Capteurs 2020 , 20 (3), 789; https://doi.org/10.3390/s20030789
Reçu: 11 octobre 2019 / Révisé: 20 janvier 2020 / Accepté: 29 janvier 2020 / Publié: 31 janvier 2020
(Cet article appartient au numéro spécial Capteurs mécaniques )
Télécharger le PDF
Mots-clés: [url=https://www.mdpi.com/search?q=adaptive control]contrôle adaptatif[/url] ; [url=https://www.mdpi.com/search?q=exoskeleton robot]robot exosquelette[/url] ; [url=https://www.mdpi.com/search?q=muscle driven simulator]simulateur entraîné par les muscles[/url] ; quaternions ; réhabilitation[url=https://www.mdpi.com/search?q=adaptive control][/url][url=https://www.mdpi.com/search?q=exoskeleton robot][/url][url=https://www.mdpi.com/search?q=muscle driven simulator][/url]
▼ Afficher les chiffres
Résumé graphique
Il s'agit d'un article en libre accès distribué sous la licence Creative Commons Attribution qui permet une utilisation, une distribution et une reproduction sans restriction sur n'importe quel support, à condition que l'œuvre originale soit correctement citée.
"
A suivre !
Cet article, publié le 31 janvier 2020, ici :
https://www.mdpi.com/1424-8220/20/3/789
et traduit via google translate (seul, le texte original en anglais de la source fait foi) :
"
ALICE: Développement conceptuel d'un robot d'exosquelette des membres inférieurs piloté par un simulateur musculo-squelettique embarqué
par
Manuel Cardona 1,2, *, †,Cecilia E. García Cena 1, †,Fernando Serrano 3, †etRoque Saltaren 1, †1
Center for Automation and Robotics (CAR), Universidad Politécnica de Madrid (UPM), 28006 Madrid, Espagne
2
Faculté de génie, Universidad Don Bosco (UDB), San Salvador, El Salvador
3
Faculté de génie et d'architecture, Universidad Tecnológica Centroamericana (UNITEC), Frente a Residencial, V-782 Boulevard Kennedy, Tegucigalpa, Honduras
*
Auteur à qui la correspondance doit être adressée.
†
Ces auteurs ont participé à ce travail à part égale.
Capteurs 2020 , 20 (3), 789; https://doi.org/10.3390/s20030789
Reçu: 11 octobre 2019 / Révisé: 20 janvier 2020 / Accepté: 29 janvier 2020 / Publié: 31 janvier 2020
(Cet article appartient au numéro spécial Capteurs mécaniques )
Télécharger le PDF
Abstrait
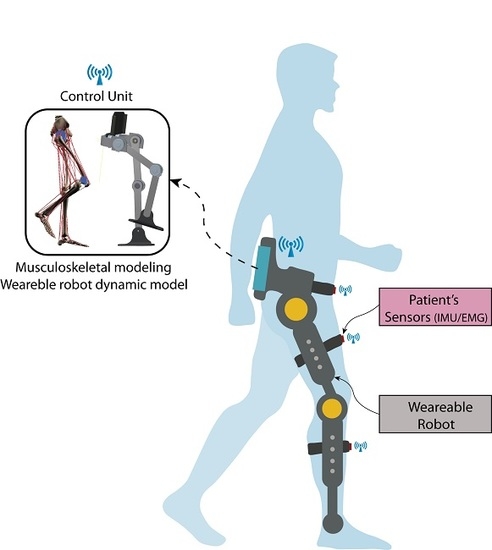
Objectif: Dans cet article, nous présentons le développement conceptuel d'une plateforme robotique, appelée ALICE (Assistive Lower Limb Controlled Exoskeleton), pour la caractérisation cinétique et cinématique de la marche. La plate-forme ALICE comprend un exosquelette portable robotique et un simulateur embarqué piloté par les muscles pour estimer les paramètres cinétiques de l'utilisateur. Contexte: Même lorsque les profils cinématiques de la démarche humaine sont bien étudiés et rapportés dans la littérature, il existe une variabilité intra-sujet considérable dans la cinétique des mouvements. ALICE vise à être un capteur mécanique avancé qui nous permet de calculer des informations en temps réel des données cinétiques et cinématiques, ouvrant un nouveau concept de rééducation personnalisé. Méthodologie: Nous avons développé un simulateur entièrement musclé dans un environnement open source et l'avons validé avec des données réelles sur la marche obtenues auprès de patients diagnostiqués avec la sclérose en plaques. Après cela, nous avons conçu, modélisé et contrôlé un exosquelette de membre inférieur de 6 DoF avec des unités de mesure inertielles et un capteur de position / vitesse dans chaque actionneur. Signification: Ce nouveau concept vise à devenir un outil pour améliorer le diagnostic de la démarche pathologique et concevoir des thérapies de rééducation robotique personnalisées. Conclusion: ALICE est la première plateforme robotique adaptée automatiquement aux paramètres de démarche cinétique et cinématique de chaque patient. Ce nouveau concept vise à devenir un outil pour améliorer le diagnostic de la démarche pathologique et concevoir des thérapies de rééducation robotique personnalisées. Conclusion: ALICE est la première plateforme robotique adaptée automatiquement aux paramètres de démarche cinétique et cinématique de chaque patient. Ce nouveau concept vise à devenir un outil pour améliorer le diagnostic de la démarche pathologique et concevoir des thérapies de rééducation robotique personnalisées. Conclusion: ALICE est la première plateforme robotique adaptée automatiquement aux paramètres de démarche cinétique et cinématique de chaque patient.Mots-clés: [url=https://www.mdpi.com/search?q=adaptive control]contrôle adaptatif[/url] ; [url=https://www.mdpi.com/search?q=exoskeleton robot]robot exosquelette[/url] ; [url=https://www.mdpi.com/search?q=muscle driven simulator]simulateur entraîné par les muscles[/url] ; quaternions ; réhabilitation[url=https://www.mdpi.com/search?q=adaptive control][/url][url=https://www.mdpi.com/search?q=exoskeleton robot][/url][url=https://www.mdpi.com/search?q=muscle driven simulator][/url]
▼ Afficher les chiffres
Résumé graphique
Il s'agit d'un article en libre accès distribué sous la licence Creative Commons Attribution qui permet une utilisation, une distribution et une reproduction sans restriction sur n'importe quel support, à condition que l'œuvre originale soit correctement citée.
"
A suivre !